Продолжаем осваивать NGSPICE.
В импульсных преобразователях входное напряжение нарезается порциями - импульсами c заданной скважностью и чем меньше скважность тем большая часть энергии попадёт на выход. Если импульсы прямоугольной формы, то силовая часть схемы работает в ключевом режиме т.е. находится либо в режиме отсечки, когда сопротивление максимально, либо в режиме насыщения - с минимальным сопротивлением. Рассеиваемая мощность на ключе P = I*U = 0*I = 0*U = 0 и выходит что у идеальных импульсных преобразователей коэффициент полезного действия (КПД) стремится к 100%. Сглаживание пульсаций выходного напряжения происходит благодаря наличию интегрирующих элементов, способных накапливать электрическую энергию и отдавать её в нагрузку. Если сравнивать импульсные преобразователи с линейными то первые как правило имеют большие размеры и больше шумят, но при этом обеспечивают значительно лучший КПД. Что интересно, импульсные преобразователи умеют не только понижать напряжение, но и повышать его !
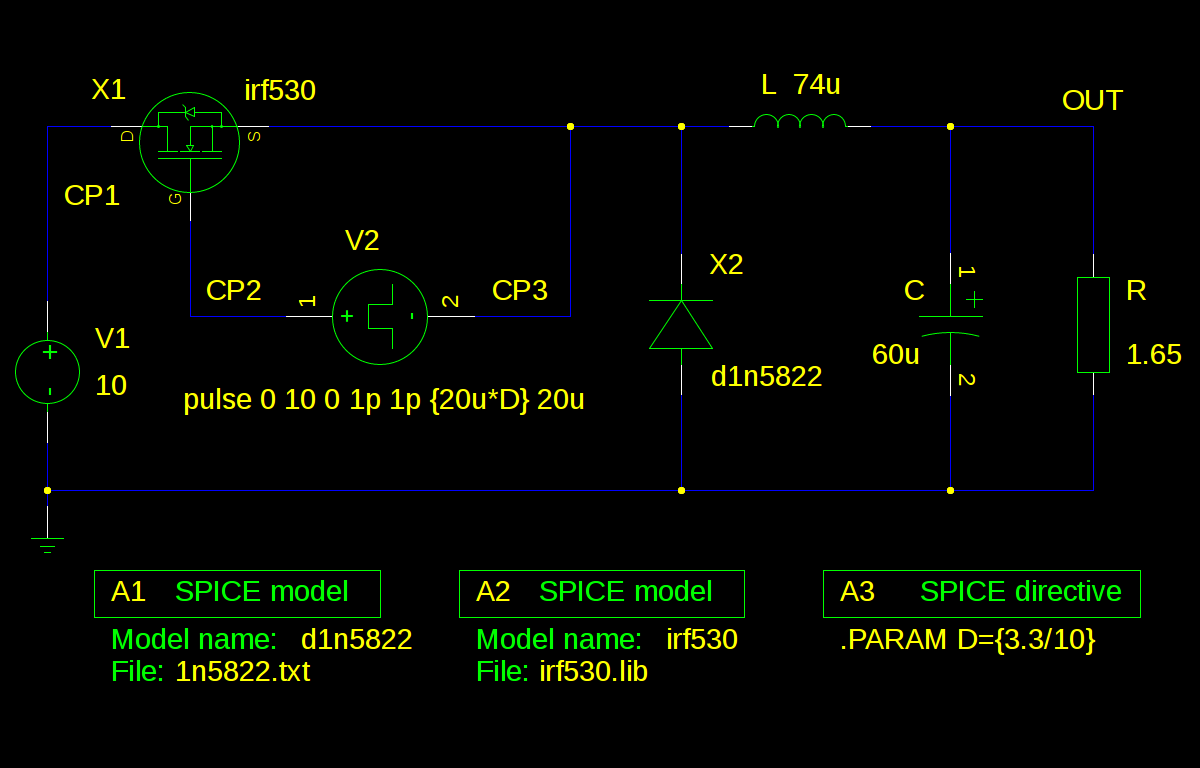
В следующих схемах использовались SPICE модели мощного полевого транзистора IRF530 и диода Шоттки (с малым падением напряжения < 0.5 В) 1n5822:
~$ wget http://www.vishay.com/docs/90181/irf530.lib
~$ wget http://www.vishay.com/docs/88003/1n5822.txt
импульсный понижающий преобразователь | netlist | ngspice.js
ngspice 1 -> source buck.net
ngspice 2 -> tran 0.3u 1m
ngspice 3 -> plot v(out)
Номиналы понижающего преобразователя расчитаны исходя из требуемого напряжения на выходе 3.3 В, напряжения на входе 10 В, тока нагрузки 2 А, частоты ключа 50кГц, пульсации тока через индуктивность 30% и допустимых пульсаций выходного напряжения 25 мВ.

Где D = Vout/Vin это коэффициент заполнения и тогда минимальная индуктивность равна (3.3*(1-3.3/10))/(50000*2*0.3) = 73.7 мкГн. Конденсатор для сглаживания пульсаций напряжения на выходе рассчитывается по формуле:

Получаем минимальную необходимую ёмкость (2*0.3)/(8*50000*0.025) = 60 мкФ
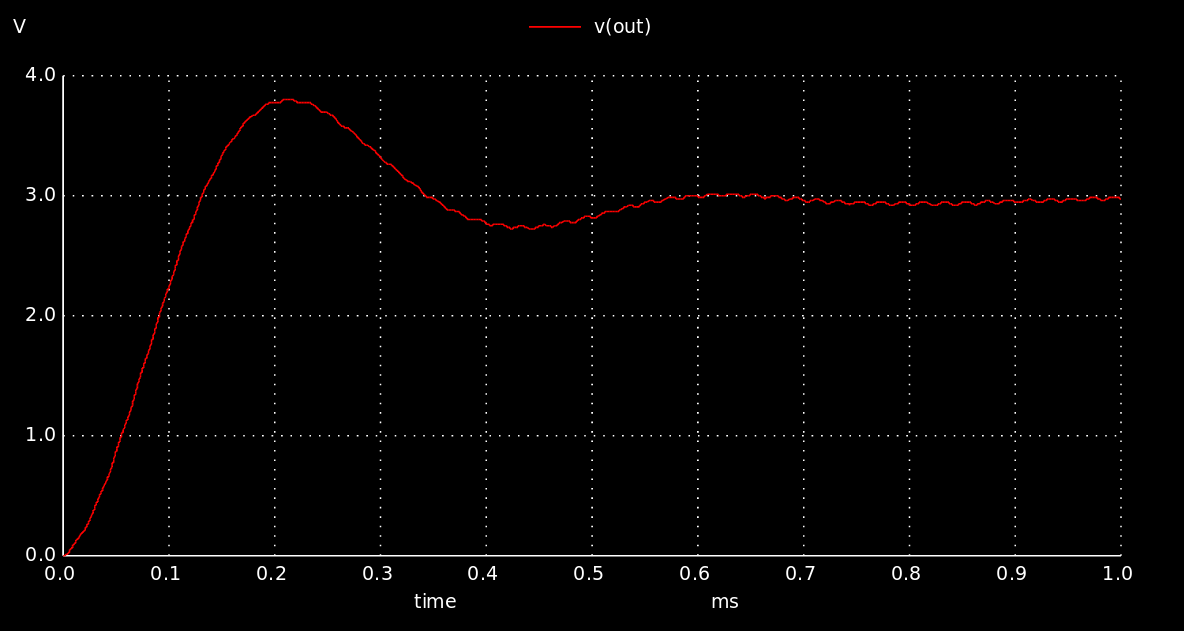
Поскольку транзистор X1 неидеальный ключ и судя по документации его сопротивление в открытом состоянии составляет 0.16 мОм, то к примеру при токе 1 А на нём будет теряться 0.16 В и это легко проверить командой plot v(cp1,cp3) ylimit 0 1 xlimit 0.5m 0.6m. На диоде также происходят потери и чем слабее диод тем большее на нём прямое напряжение и тем хуже он справляется с функцией ключа. Из-за потерь напряжение на выходе не дотягивает до 3.3 В, но подправить ситуации можно увеличив D с 0.33 до приблизительно 0.37. Что касается скачка напряжения на старте то в цепи находится последовательный колебательный контур c периодом колебаний 2*3.14*sqrt(74*10^-6*60*10^-6) ≈ 0.42 мс. Чем меньше сопротивление нагрузки R тем меньше амплитуда этих колебаний и тем быстрее они затухают.
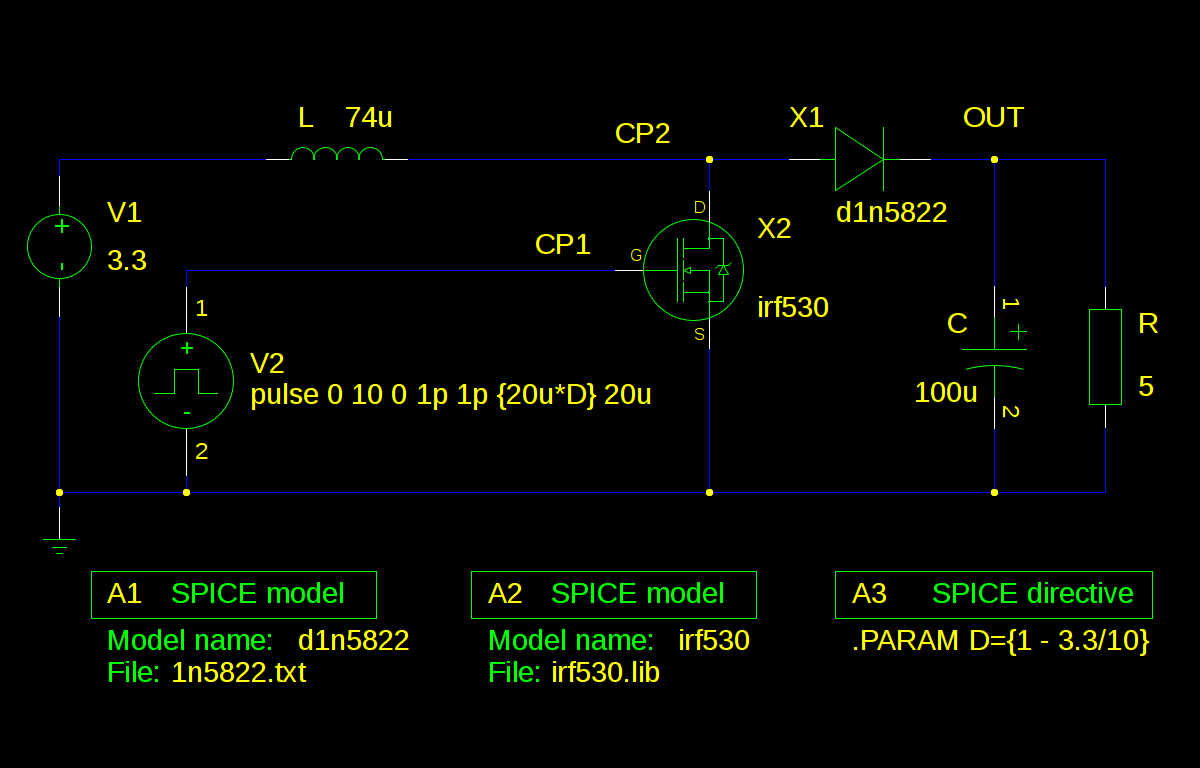
импульсный повышающий преобразователь | netlist | ngspice.js
ngspice 1 -> source boost.net
ngspice 2 -> tran 0.5u 3m
ngspice 3 -> plot v(out) ylimit 2 10
Номиналы повышающего преобразователя расчитаны исходя из требуемого напряжения на выходе 10 В, напряжения на входе 3.3 В, тока нагрузки 2 А, частоты ключа 50кГц, пульсации тока через индуктивность 30% и допустимых пульсаций выходного напряжения 250 мВ.

Где D = 1 - (Vin/Vout) это коэффициент заполнения и тогда минимальная индуктивность равна (3.3*(1-3.3/10))/(50000*2*0.3) = 73.7 мкГн. Конденсатор для сглаживания пульсаций напряжения на выходе рассчитывается по формуле:

Получаем минимальную ёмкость 2*(1-3.3/10)/(50000*0.25) = 107.2 мкФ
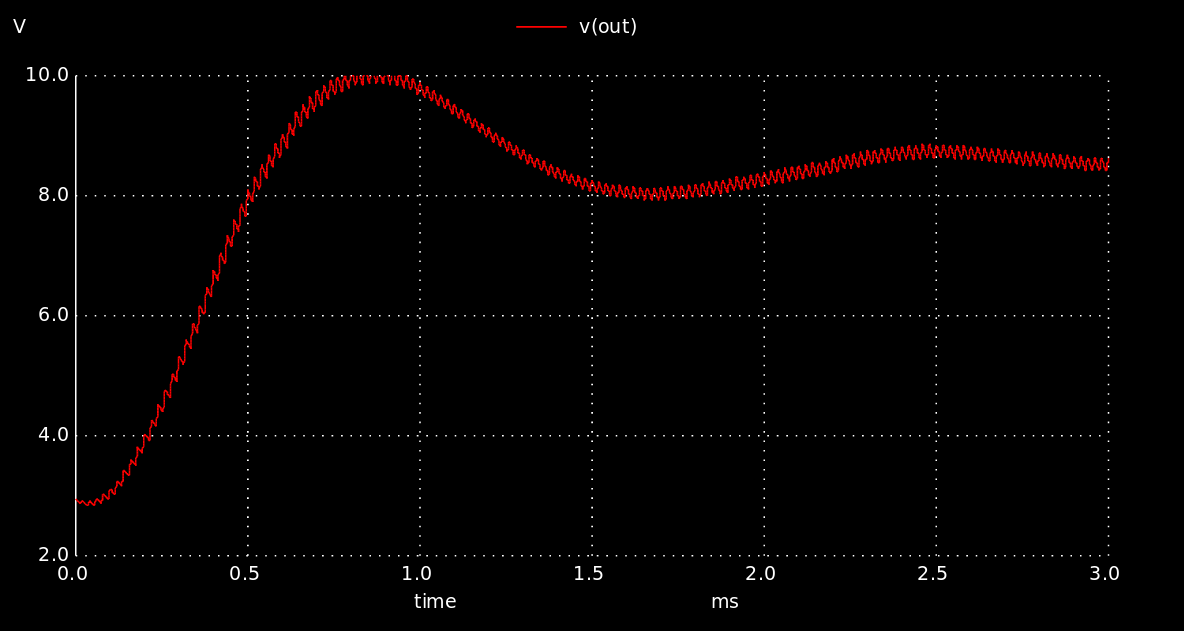
Компенсировать потери на транзисторе и диоде можно подтянув коэффициент заполнения D с 0.67 до 0.74.
К сожалению выходное напряжение как понижающего так и повышающего импульсного преобразователя зависит от входного напряжения и величины сопротивления нагрузки R. Это несложно проверить командой alter r 10k - напряжение в обоих преобразователях поползёт вверх. Для стабилизации вводят обратную связь, в которой ошибка напряжения на выходе управляет скважностью импульсов с каким-то заранее рассчитанным коэффициентом пропорциональности и получается П-регулятор. Для уменьшения временной задержки между ошибкой и её устранением добавляют интегральную и дифференцирующую составляющую и получается ПИД-регулятор. К счастью можно воспользоваться готовыми микросхемами DC/DC преобразователей, которые значительно упрощают жизнь, сводя количество расчётов к миниму.
Далее интегральный таймер 555.