В предыдущем посте была подготовлена почва для работы с Манчестерским кодом. Теперь рассмотрим реальный пример с использованием микроконтроллеров Microchip - один будет кодировать и передавать данные, другой принимать, декодировать и выводить результат в UART - терминал. Поскольку это тестовый пример, то с выбором C - компилятора ничего выдумывать не будем и возьмём то, что по умолчанию даёт производитель - пробную версию mplabc18 (mplabc18_v3.40_windows_eval.exe) на 60 дней, скачать можно с официального сайта с родной средой разработки MPLAB_IDE (v8_70).
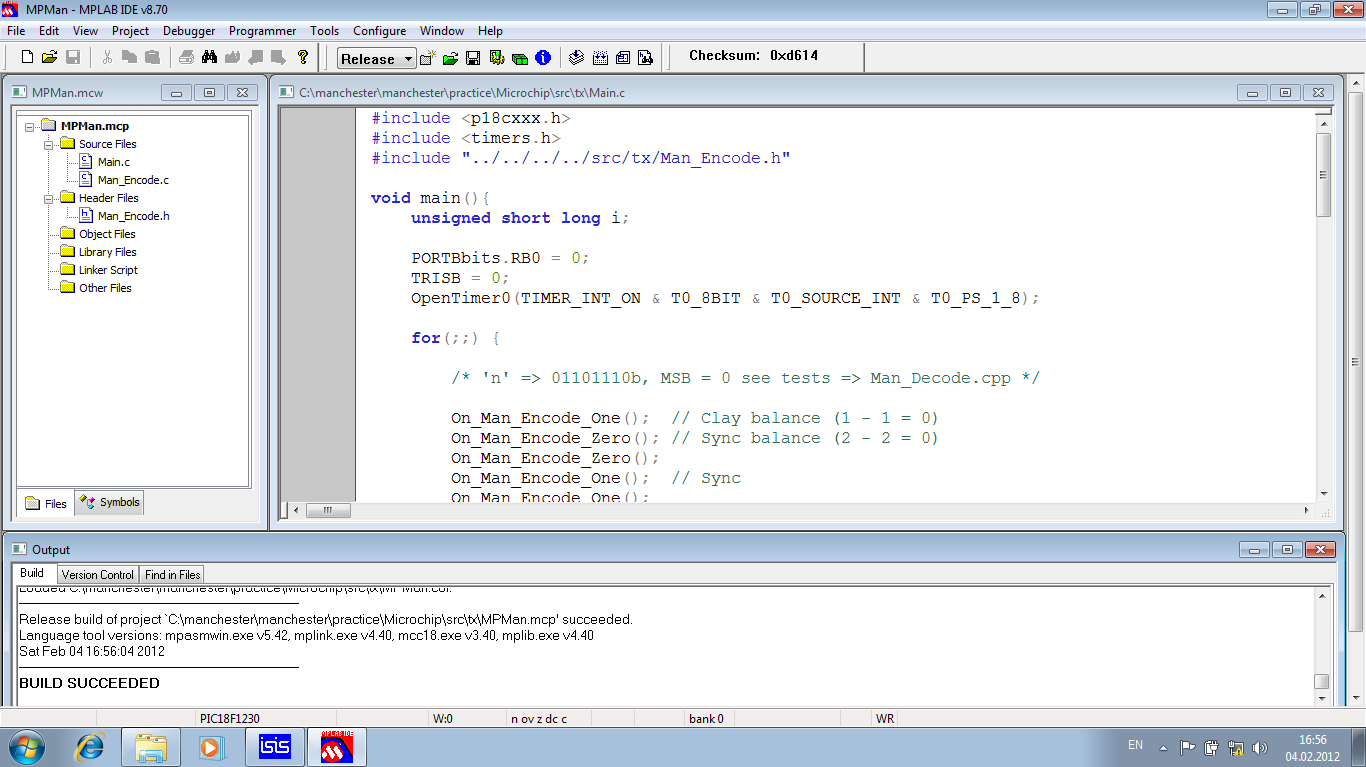
Как и в прошлый раз начнём с простого - реализуем устройство, которое преобразовывает последовательность данных в Манчестерский Код и передаёт их. Прежде всего необходимо создать новый проект в MPLAB, мастер попросит указать модель микроконтроллера - тут каких-либо особых требований нет, поэтому можно выбрать самый простой, например PIC18F1230. В результате должно получиться что-то вроде этого:
#include <p18cxxx.h>
#include <timers.h>
#include "../../../../src/tx/Man_Encode.h"
void main(){
unsigned short long i;
PORTBbits.RB0 = 0;
TRISB = 0;
OpenTimer0(TIMER_INT_ON & T0_8BIT & T0_SOURCE_INT & T0_PS_1_8);
for(;;) {
/* 'n' => 01101110b, MSB = 0 see tests => Man_Decode.cpp */
On_Man_Encode_One(); // Clay balance (1 - 1 = 0)
On_Man_Encode_Zero(); // Sync balance (2 - 2 = 0)
On_Man_Encode_Zero();
On_Man_Encode_One(); // Sync
On_Man_Encode_One();
On_Man_Encode_Zero(); // Clay
Man_Encode('n');
Man_Encode('o');
Man_Encode('n');
Man_Encode('g');
Man_Encode('r');
Man_Encode('e');
Man_Encode('e');
Man_Encode('d');
Man_Encode('y');
Man_Encode('.');
Man_Encode('r');
Man_Encode('u');
Man_Encode('\r');
Man_Encode('\n');
On_Man_Encode_Zero(); /* Tx off */
for(i = 150000; i; i--);
}
}
void On_Man_Encode_One(){
while(!INTCONbits.TMR0IF);
TMR0L -= 104; // 4Mhz/4/8/1200bp/s = 104
INTCONbits.TMR0IF = 0;
PORTBbits.RB0 = 1;
}
void On_Man_Encode_Zero(){
while(!INTCONbits.TMR0IF);
TMR0L -= 104; // 4Mhz/4/8/1200bp/s = 104
INTCONbits.TMR0IF = 0;
PORTBbits.RB0 = 0;
}
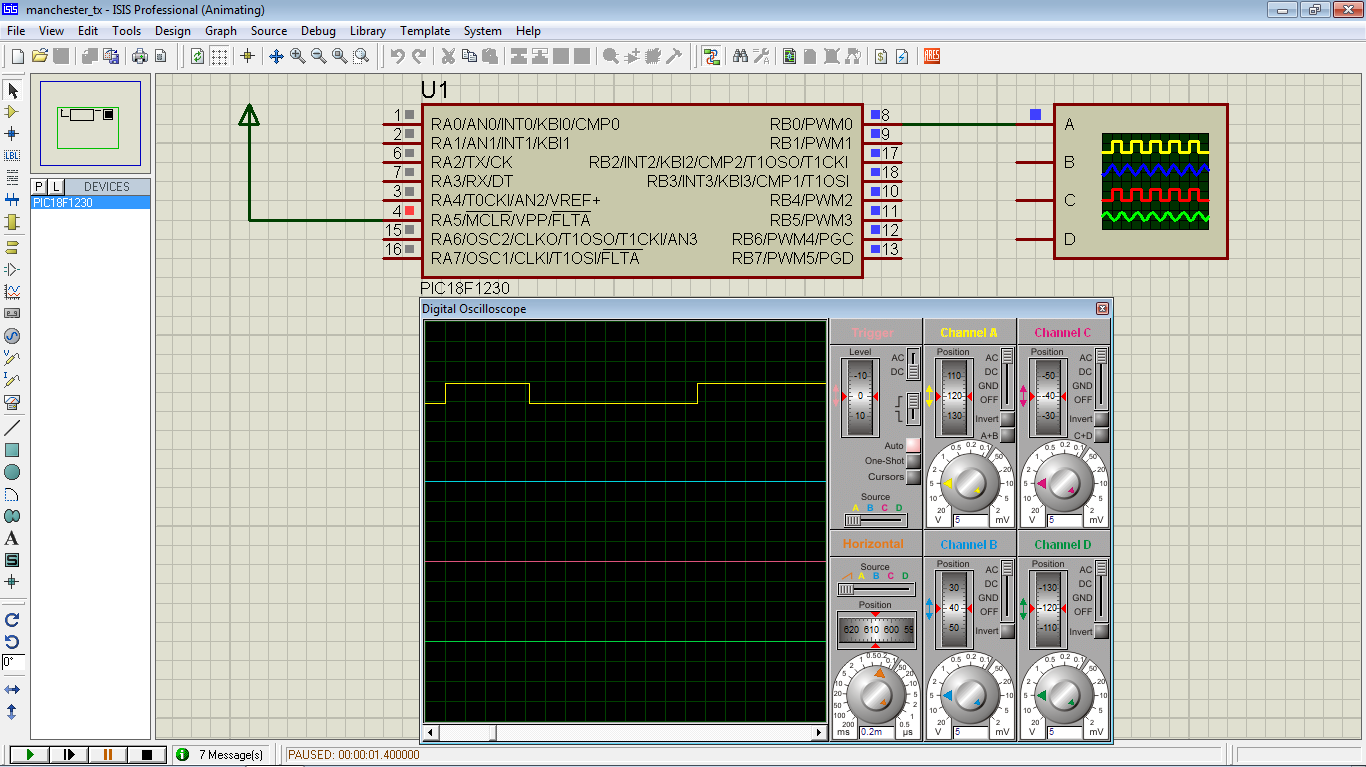
Результатом сборки является файл с расширением .hex, в народе просто хекс - прошивка, которую необходимо записать в микроконтроллер с помощью специального оборудования (программатора). Поскольку последнего, наверно, у Вас нет, можно задействовать виртуальную среду, которая умеет эмулировать поведение электронных схем - Proteus VSM (v 7.9sp1). Как видно из рисунка на виртуальном осциллографе время логической 1 чуть больше 4 делений при шаге 0.2 мс. При скорости 1200 бит/с 1000 мс / 1200 = 0,83 мс это похоже на правду.
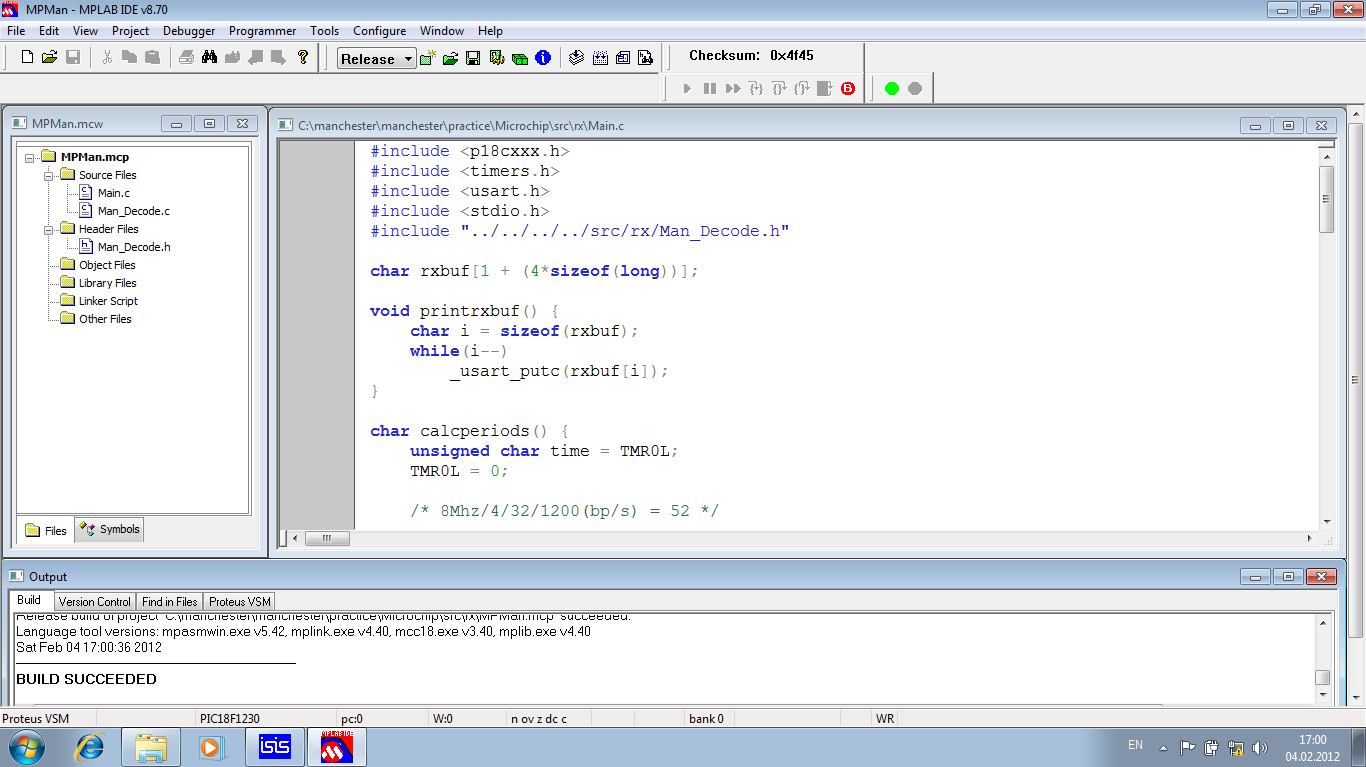
Теперь реализуем приёмник, который будет анализировать состояние на входе (вывод RB0), декодировать сигнал из Манчестерского Кода в оригинальный и принимать решение о том, что передача полезных данных завершена. Самый простой способ отобразить данные при работе в Proteus VSM - использовать виртуальный UART - терминал.
#include <p18cxxx.h>
#include <timers.h>
#include <usart.h>
#include <stdio.h>
#include "../../../../src/rx/Man_Decode.h"
char rxbuf[1 + (4*sizeof(long))];
void printrxbuf() {
char i = sizeof(rxbuf);
while(i--)
_usart_putc(rxbuf[i]);
}
char calcperiods() {
unsigned char time = TMR0L;
TMR0L = 0;
/* 8Mhz/4/32/1200(bp/s) = 52 */
if (time < 52/2) return 0;
if (time < 3*(52 / 2)) return 1;
return 2;
}
void main(){
OpenTimer0(TIMER_INT_OFF & T0_8BIT & T0_SOURCE_INT & T0_PS_1_32);
OpenUSART( USART_TX_INT_OFF & USART_RX_INT_OFF &
USART_ASYNCH_MODE & USART_EIGHT_BIT &
USART_CONT_RX & USART_BRGH_HIGH, 12 ); // 38400 b/s
for(;;) {
memset(rxbuf, 0, sizeof(rxbuf));
for(;;) {
char ds_B;
if (rxbuf[1] == '\r' && rxbuf[0] == '\n') {
printrxbuf();
break;
}
if ( PORTBbits.RB0 ) {
if ( ds_B ) continue;
ds_B = 1;
Man_Decode_Stable_Zero(calcperiods());
} else {
if ( !ds_B ) continue;
ds_B = 0;
Man_Decode_Stable_One(calcperiods());
}
}
}
}
void shiftrxbuf() {
*(( unsigned long* )&rxbuf[12]) <<= 1;
if (rxbuf[11] & 0x80) rxbuf[12] |= 1;
*(( unsigned long* )&rxbuf[8]) <<= 1;
if (rxbuf[7] & 0x80) rxbuf[8] |= 1;
*(( unsigned long* )&rxbuf[4]) <<= 1;
if (rxbuf[3] & 0x80) rxbuf[4] |= 1;
*(( unsigned long* )&rxbuf) <<= 1;
}
void On_Man_Decode_Add_0(){
shiftrxbuf();
rxbuf[0] &= 0xFE;
}
void On_Man_Decode_Add_1(){
shiftrxbuf();
rxbuf[0] |= 1;
}
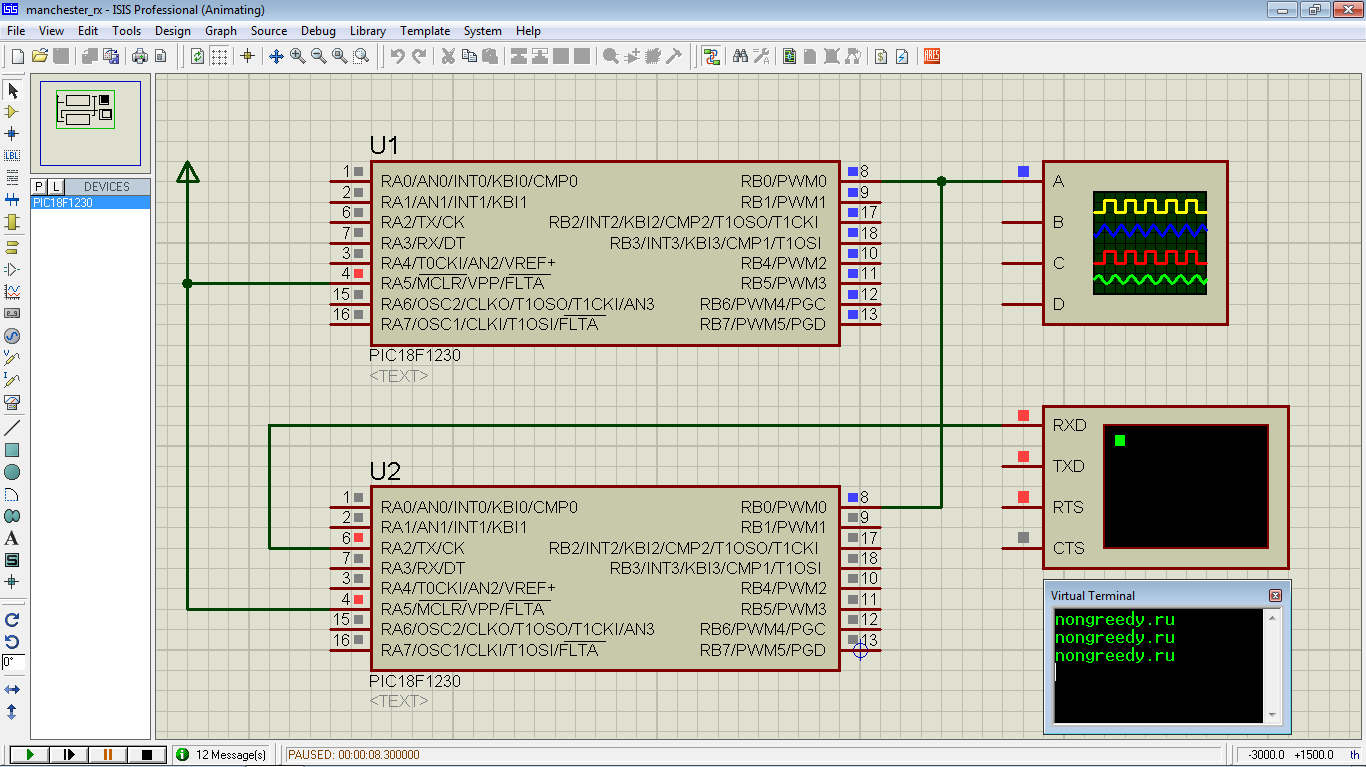
Как видно из кода, признаком окончания передачи данных в данном примере является комбинация символов '\r' и '\n'. Это очень простое решение, при использовании в реальных условиях этот механизм нужно доработать - иначе иногда можно получать ложный сигнал о завершении передачи данных. Также стоит обратить внимание на буфер rxbuf, в который программа записывает декодированные данные с помощью метода shiftrxbuf(). Етот метод делает операцию побитового сдвига для всего буфера, как если бы это был простой (примитивный) тип данных типа char, long и т.д. Если всё это теперь запустить в Proteus VSM, то результат будет примерно таким:
Вроде всё, исходники на GitHub.