Вы перепрошивали когда-нибудь BIOS ? Если нет, то Вам скорее всего, повезло... Вобщем представьте себе BIOS, который не умеет прошивать сам себя и если что-то не работает или работает плохо (его разрабатывают люди, точно такие же как и мы с Вами), нужно выключить компьютер, открутить пару шурупов, снять крышку, вытянуть микросхему BIOS, найти совместимый программатор, ПРОШИТЬ, после чего сделать всё то же самое в обратном порядке. Пару раз сделать можно, но хотелось бы что-нибудь поудобнее, особенно если предполагается этот процесс часто повторять в процессе разработки.
После того, как микроконтроллеры Microchip научились программно считывать/записывать ячейки своей Flash-памяти (появились соответствующие инструкции ассемблера), появление Bootloader'ов - это был лишь вопрос времени. Очень хорошо, когда этим вопросом занимается непосредственно производитель микроконтроллеров - кто как не он лучше осведомлён о возможностях своей продукции. На одном из таких Bootloader'ов под названием AN1310, ориентированном на линейку PIC16 / PIC18 и использующим для коммуникации последовательный интерфейс UART давайте остановимся поподробнее. Скачать всё необходимое для работы ПО можно с сайта производителя.
Особенности AN1310:
-
Использует маленький объём Flash памяти микроконтроллера - в большинстве случаев менее 450 слов
-
Автоматическое согласование скорости передачи данных UART между ПК (host) и микроконтроллером
-
Широкий диапазон для выбора скорости передачи 1,200 Кбит/с - 3 Mбит/с
-
Протокол обмена данными использует 16-бит CRC
-
Имеется возможность записывать Flash только по тем адресам, которые изменились (Incremental Bootloading) - это значительно ускоряет процесс разработки
-
Mинимум соединительных элементов - можно обойтись всего тремя проводниками
-
ПО на стороне ПК кроссплатформенное - код написан на С / С++ Qt SDK, есть исходники
Шаг первый - схемотехника
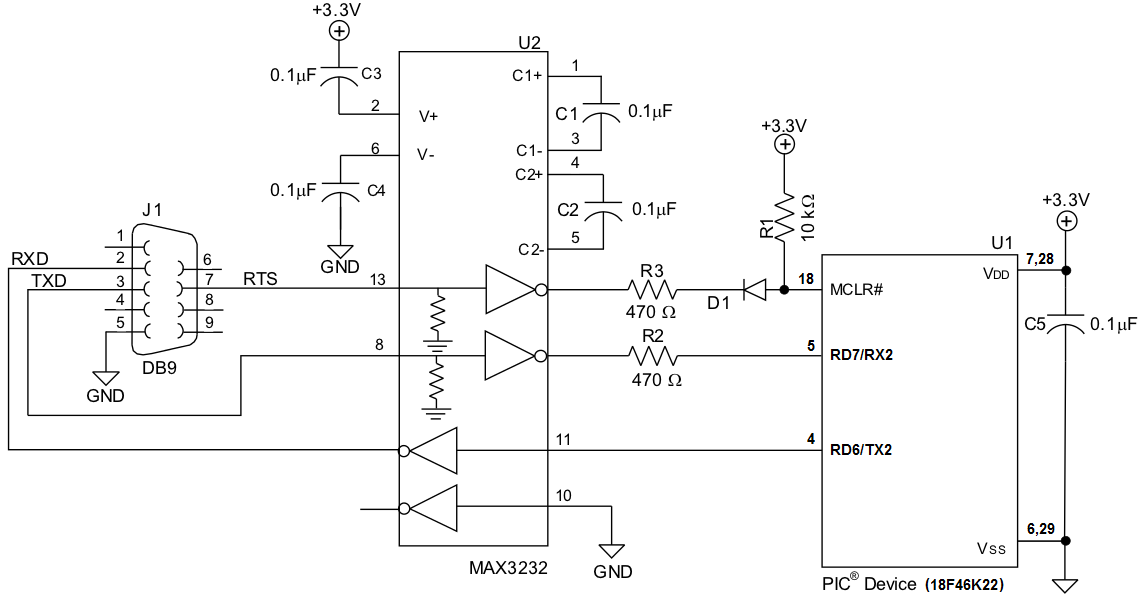
В документации предлагаются две схемы. Для согласования уровней используется микросхема MAX3232:
Если напряжение питания микроконтроллера отличается от напряжения питания MAX3232, то предлагается ввести дополнительный MOSFET транзистор:
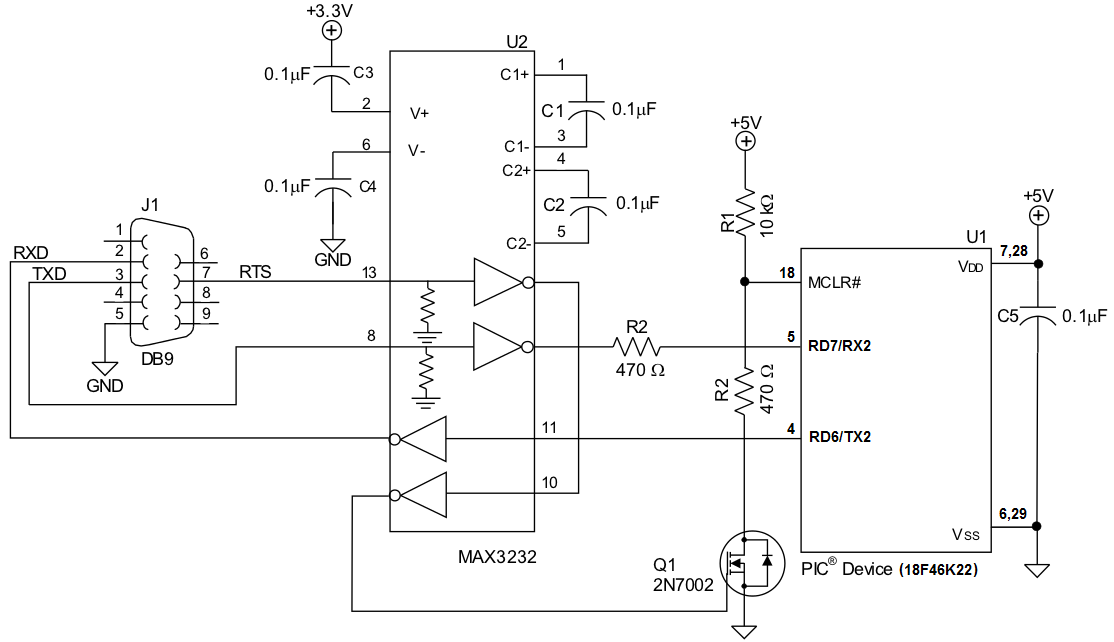
Однако представленные схемы можно значительно упростить / удешевить, если использовать переходник USB-to-serial (например на PL2303 или FT232BM). Уровень логической единицы у PL2303 - 3.3V и если напряжение питания микроконтроллера находится в пределах 3 ... 3.3V, MAX3232 не понадобится. В таком случае необходим только подтягивающий резистор с Vdd на RX, чтобы избежать случайной загрузки Bootloader'а при отключённом переходнике USB-to-serial. Что касается сигнала RTS (см. схемы), то он используется для сброса микроконтроллера (RESET), а поскольку такого же эффекта можно достичь просто отключив/включив питание, то его использование опционально. В случаее с USB-to-serial как правило имеется только RX, TX и GND, поэтому удобней сбрасывать микроконтроллер вручную.
Шаг второй - прошивка микроконтроллера
 Исходники AN1310 упакованы в исполняемый *.exe файл, так что поначалу необходима ОС Windows (как вариант можно ещё попробовать установить Wine и запустить инсталляцию там, но Ваш покорный слуга этот способ на практике не проверял). Неприятная ситуация с Windows также повторяется и в процессе сборки Bootloader'а - для работы с MPasm / MPLAB, чтобы сгенерировать хекс. После того, как Bootloader будет уже в прошит кристалле, об ОС Windows можно спокойно забыть.
Исходники AN1310 упакованы в исполняемый *.exe файл, так что поначалу необходима ОС Windows (как вариант можно ещё попробовать установить Wine и запустить инсталляцию там, но Ваш покорный слуга этот способ на практике не проверял). Неприятная ситуация с Windows также повторяется и в процессе сборки Bootloader'а - для работы с MPasm / MPLAB, чтобы сгенерировать хекс. После того, как Bootloader будет уже в прошит кристалле, об ОС Windows можно спокойно забыть.
Cкачанный с сайта Microchip инсталлятор Serial Bootloader AN1310 v1.05r.exe по умолчанию в процессе установки на ПК распаковывает исходные коды для создания прошивки микроконтроллера сюда:
C:\Microchip Solutions\Serial Bootloader AN1310 vX.XX\PICxx Bootloader\
-
Код написан на ассемблере - MPasm, для его редактирования и сборки удобно использовать MPLAB IDE
-
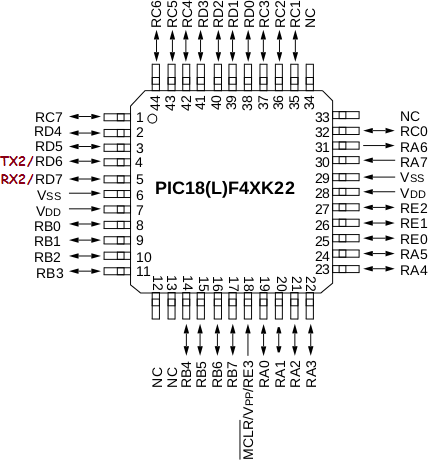
В меню Configure -> Select Device… выбрать модель микроконтроллера (например PIC18F46K22)
-
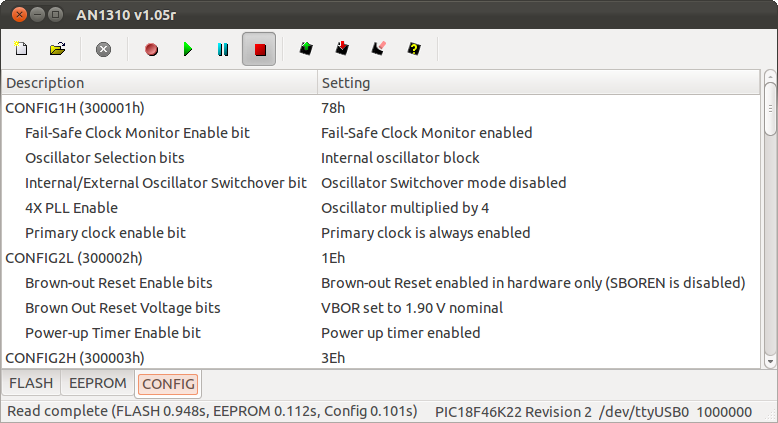
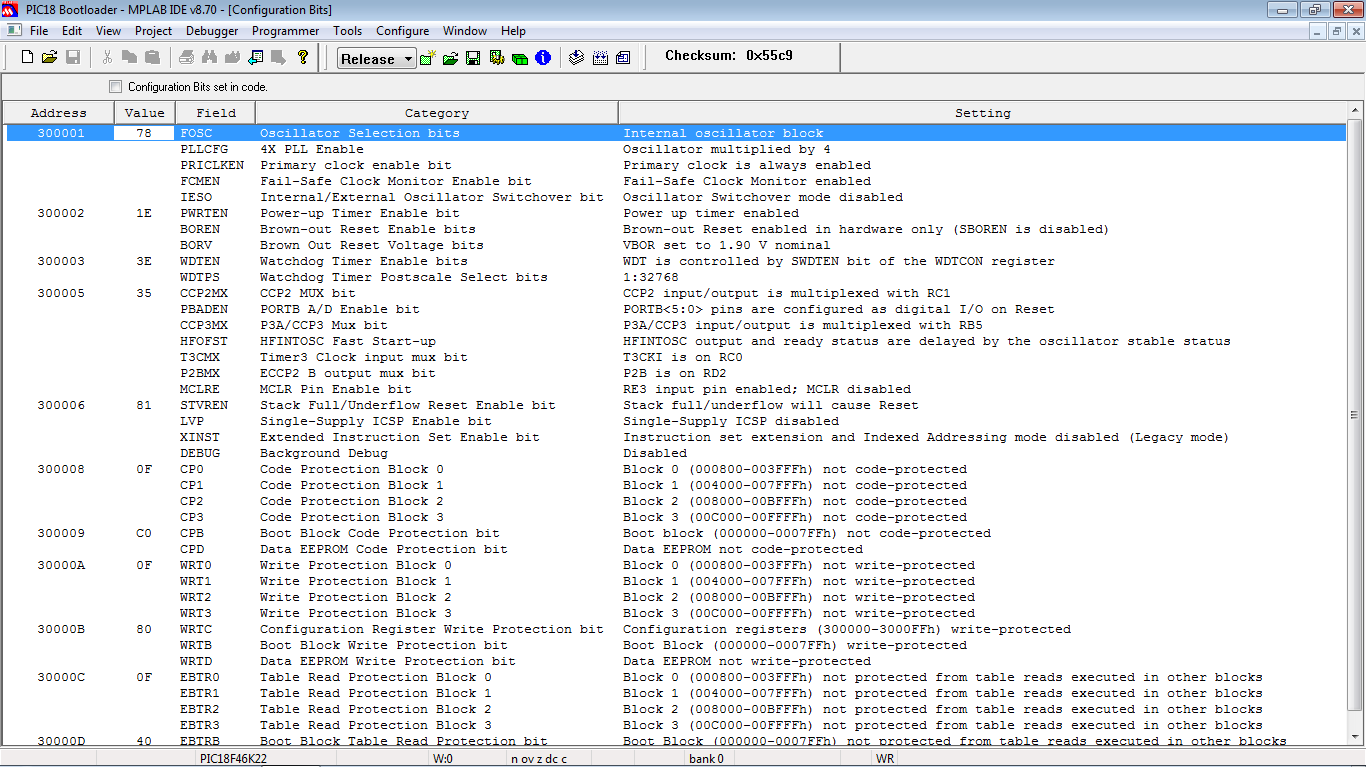
В меню Configure -> Configuration Bits….
Watchdog Timer “Disabled”, однако его можно задействовать программно Extended Instruction Set Enable bit “Disabled” Oscillator Selection bits Чем больше тактовая частота, тем выше предельная скорость UART Fail-Safe Clock Monitor Enable bit “Enabled”, если имеется Low-Voltage Program (LVP) “Disabled”, если имеется Table Read-Protect “Disabled”, если имеется -
Собрать проект и прошить микроконтроллер программатором )))
В случае необходимости можно отредактировать код bootconfig.inc. Например, PIC18F46K22 имеет на борту два USART модуля, а Bootloader по умолчанию использует первый. В этом же файле можно выбрать один из двух режимов работы Bootloader'а:
-
По умолчанию, хекс Bootloader'а располагается в конце Flash-памяти, в этом случае основная программа микроконтроллера может сама обслуживать прерывания, т.е. фактически её работа ничем не отличается от работы без Bootloader'а. Единственное, что необходимо знать компилятору основной программы - участок занятой Flash-памяти, при использовании HI-TECH С для этой цели можно указать в командной строке что-то вроде
--ROM=default,-F800-FBFF. Однако подобная реализация Bootloader'а имеет один существенный недостаток - в случае аппаратного сбоя (например отключили питание) в процессе записи его прошивка может повредиться - в этом случае снова понадобится программатор. Даже если с помощью битов конфигурации аппаратно защитить конец Flash-памяти, остаётся как минимум одна инструкция (GOTO), расположенная по адресу 0000h, защитить которую не коснувшись обработки прерываний (0008h, 0018h) мы не можем - аппаратно защищать Flash-память от записи можно только блоками. -
В этой связи целесообразно задействовать второй вариант Bootloader'а, в документации он обозначен как REMAPPED. Он располагается в начале Flash-памяти и сам обслуживает прерывания, фактически пробрасывает их по другим адресам, например: 0008h => 0808h, 0018h => 0818h. Такой подход добавляет теоретическую(инструкция GOTO) задержку в процесс обработки прерываний, однако имеет два очевидных преимущества. Во-первых, практически у всех микроконтроллеров Flash имеет boot-блок, объём которого меньше других - он как раз ориентирован на Bootloader'ы. Это позволяет более рационально и экономно распределить ресурсы Flash-памяти между микроконтроллером и Bootloader'ом. Во-вторых, весь код, который необходим для работы Bootloader'а можно аппаратно защитить от записи, ничто не cможет его повредить. Чтобы задействовать REMAPPED Bootloader, необходимо в bootconfig.inc указать
#define BOOTLOADER_ADDRESS 0. Также, исходя из размера boot-блока, необходимо указать, куда Bootloader должен пробрасывать прерывания, обозначив:AppVector 0x800,AppHighIntVector 0x808иAppLowIntVector 0x818. Обо всём этом необходимо сообщить компилятору основной программы. Для HI-TECH С это будет выглядеть вот так:--RUNTIME=default,+download --CODEOFFSET=800 --ROM=default,-0-7FF
bootconfig.inc
; Copyright (c) 2002-2011, Microchip Technology Inc.
;
; Microchip licenses this software to you solely for use with Microchip
; products. The software is owned by Microchip and its licensors, and
; is protected under applicable copyright laws. All rights reserved.
;
; SOFTWARE IS PROVIDED "AS IS." MICROCHIP EXPRESSLY DISCLAIMS ANY
; WARRANTY OF ANY KIND, WHETHER EXPRESS OR IMPLIED, INCLUDING BUT
; NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS
; FOR A PARTICULAR PURPOSE, OR NON-INFRINGEMENT. IN NO EVENT SHALL
; MICROCHIP BE LIABLE FOR ANY INCIDENTAL, SPECIAL, INDIRECT OR
; CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, HARM TO YOUR
; EQUIPMENT, COST OF PROCUREMENT OF SUBSTITUTE GOODS, TECHNOLOGY
; OR SERVICES, ANY CLAIMS BY THIRD PARTIES (INCLUDING BUT NOT LIMITED
; TO ANY DEFENSE THEREOF), ANY CLAIMS FOR INDEMNITY OR CONTRIBUTION,
; OR OTHER SIMILAR COSTS.
;
; To the fullest extent allowed by law, Microchip and its licensors
; liability shall not exceed the amount of fees, if any, that you
; have paid directly to Microchip to use this software.
;
; MICROCHIP PROVIDES THIS SOFTWARE CONDITIONALLY UPON YOUR ACCEPTANCE
; OF THESE TERMS.
; Enable this to work around timing bug found in some PIC18Fxx20's
;#define TBLWT_BUG
; If you don't have an RS232 transceiver, you might want this option
;#define INVERT_UART
; Sets OSCCON<IRCF2:IRCF0> for maximum INTOSC frequency (8MHz)
#define USE_MAX_INTOSC
; Sets OSCTUNE.PLLEN bit at start up for frequency multiplication.
#define USE_PLL
; RB0 = 1 required to enable MAX3221 TX output on PICDEM LCD 2 demo board
;#define PICDEM_LCD2
; enable software boot block write protection
#define USE_SOFTBOOTWP
; enable software config words write protection
;#define USE_SOFTCONFIGWP
; Autobaud will be used by default.
; To save code space or to force a specific baud rate to be used,
; you can optionally define a BAUDRG value instead.
; Most PIC18's support BRG16 mode and use the
; following equation:
; BAUDRG = Fosc / (4 * Baud Rate) - 1
;
; Old PIC18's without BRG16 mode need this equation instead:
; BAUDRG = Fosc / (16 * Baud Rate) - 1
;
; Examples:
;#define BAUDRG .51 ; 19.2Kbps from 4MHz (BRG16 = 1, BRGH = 1)
;#define BAUDRG .103 ; 115.2Kbps from 48MHz (BRG16 = 1, BRGH = 1)
;#define BAUDRG .85 ; 115.2Kbps from 40MHz (BRG16 = 1, BRGH = 1)
;#define BAUDRG .68 ; 115.2Kbps from 32MHz (BRG16 = 1, BRGH = 1)
;#define BAUDRG .16 ; 115.2Kbps from 8MHz (BRG16 = 1, BRGH = 1)
;#define BAUDRG .11 ; 1Mbps from 48MHz (BRG16 = 1, BRGH = 1)
;#define BAUDRG .9 ; 1Mbps from 40MHz (BRG16 = 1, BRGH = 1)
;#define BAUDRG .4 ; 2Mbps from 40MHz (BRG16 = 1, BRGH = 1)
;#define BAUDRG .3 ; 3Mbps from 48MHz (BRG16 = 1, BRGH = 1)
;#define BAUDRG .12 ; 19.2Kbps from 4MHz (BRG16 = 0, BRGH = 1)
;#define BAUDRG .10 ; 115.2Kbps from 19.6608MHz (BRG16 = 0, BRGH = 1)
; Bootloader must start at the beginning of a FLASH Erase Block.
; If unspecified, bootloader will automatically be located at the
; end of program memory address space.
; bootloader at beginning, application start/ISR vectors
; require remapping
#define BOOTLOADER_ADDRESS 0
; useful for running under debugger
; (debug executive wants to reside at the end of memory space too)
;#define BOOTLOADER_ADDRESS END_FLASH - (ERASE_FLASH_BLOCKSIZE * 20)
; use on J parts to locate inside flash config erase block
;#define BOOTLOADER_ADDRESS (END_FLASH - ERASE_FLASH_BLOCKSIZE)
#ifdef BOOTLOADER_ADDRESS
#if BOOTLOADER_ADDRESS == 0
; For Bootloader located at program memory address 0,
; the application firmware must provide remapped reset
; and interrupt vectors outside of the Boot Block. The following
; #defines tell the bootloader firmware where application
; entry points are to be expected:
; application start up code should be located here.
#define AppVector 0x800
; application high priority interrupt should be located here
#define AppHighIntVector 0x808
; application low priority interrupt should be located here
#define AppLowIntVector 0x818
#endif
#endif
; Define UART pins and registers.
; Modify the following lines if you want to use a different UART module.
;
; Note: If your UART's RX pin happens to be multiplexed with analog
; ANx input functionality, you may need to edit the
; "preprocess.inc" DigitalInput macro. Code there needs to
; enable the digital input buffer (refer to ADC chapter
; of your device's datasheet).
;
#define UARTNUM 2
#if UARTNUM == 1
#define UxSPBRG SPBRG
#define UxSPBRGH SPBRGH
#define UxRCSTA RCSTA
#define UxTXSTA TXSTA
#define UxRCREG RCREG
#define UxTXREG TXREG
#define UxPIR PIR1
#define UxRCIF RCIF
#define UxTXIF TXIF
#define UxBAUDCON BAUDCON
; RX on RC7 is used by default for most PIC18's.
; #define RXPORT PORTC
; #define RXPIN .7
; #define RXPORT PORTB ; PIC18F14K50: RX on RB5/AN11
; #define RXPIN .5
; RX/AN11 multiplexed -- must enable digital input buffer
; #define RXANSEL ANSELH
; ANSELH<3> controls AN11 digital input buffer
; #define RXAN .3
#endif
#if UARTNUM == 2
#define UxSPBRG SPBRG2
#define UxSPBRGH SPBRGH2
#define UxRCSTA RCSTA2
#define UxTXSTA TXSTA2
#define UxRCREG RCREG2
#define UxTXREG TXREG2
#define UxPIR PIR3
#define UxRCIF RC2IF
#define UxTXIF TX2IF
#define UxBAUDCON BAUDCON2
; RG2 is default RX2 pin for some high pin count PIC18's.
; #define RXPORT PORTG
; #define RXPIN .2
; RX2 pin PPS'ed to RD4/RP21 on PIC18F46J11 for example.
#define RXPORT PORTD
#define RXPIN .7
; On PICs where RX is multiplexed with ANx analog inputs,
#define RXANSEL ANSELD
; the digital input buffer needs to be enabled via ANSELx SFRs
#define RXAN .7
; devices that use PPS to remap UART2 pins will need these
; lines defined:
; PPS code for TX2/CK2 output function
; #define PPS_UTX .5
; #define PPS_UTX_PIN RPOR23 ; UART TX assigned to RP23 pin
; #define PPS_URX_PIN .21 ; UART RX assigned to RP21 pin
; PPS register for RX2/CK2 input function
; #define PPS_URX RPINR16
#endif
; If you get linker errors complaining
; "can not fit the absolute section," you might want to
; increase BOOTLOADERSIZE below or set the
; BOOTLOADER_ADDRESS above to a smaller address number.
; Because we need to know the total size of the
; bootloader before the assembler has finished compiling
; the source code, we have to estimate the final bootloader
; size and provide it here as BOOTLOADERSIZE. This number
; is in bytes (twice the instruction word count).
;
; If you see the bootloader is reserving more FLASH memory
; than it really needs (you'll see a bunch of FFFF/NOP
; instructions at the end of the bootloader memory region),
; you can try reducing BOOTLOADERSIZE.
#define BOOTLOADERSIZE .708
#define MAJOR_VERSION .1 ; Bootloader Firmware Version
#define MINOR_VERSION .5
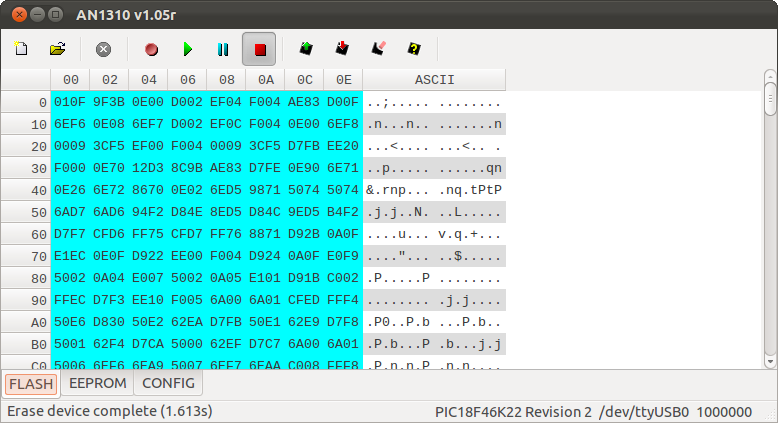
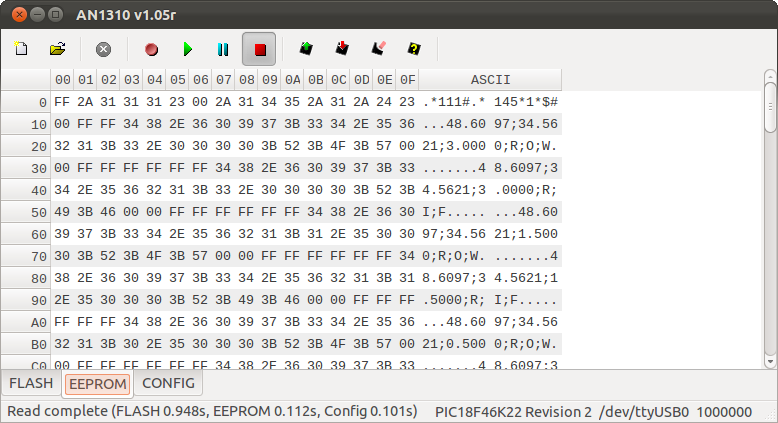
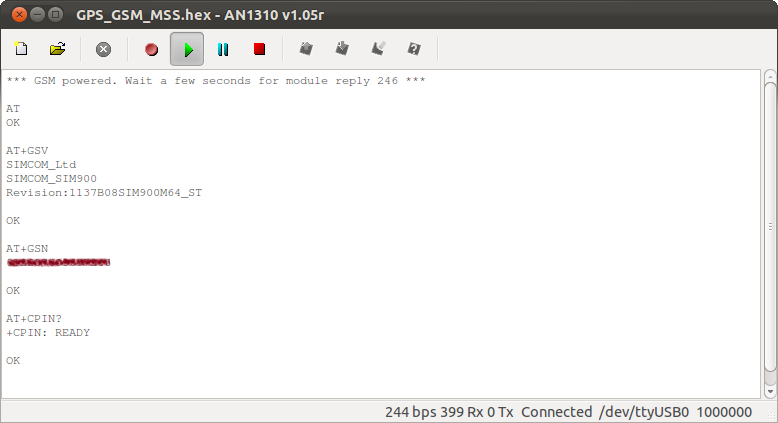
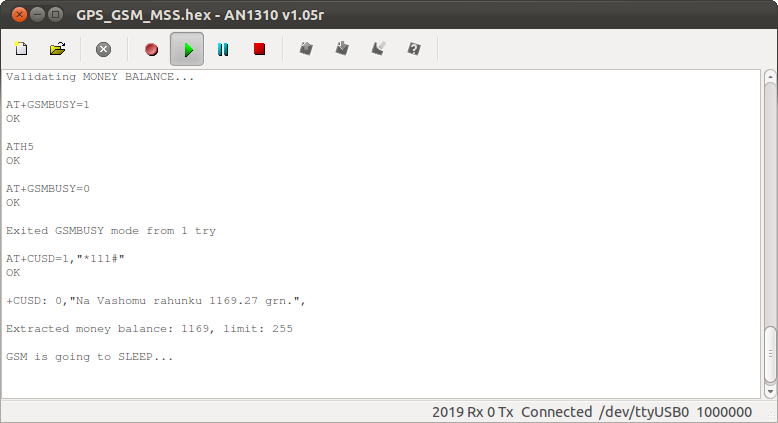
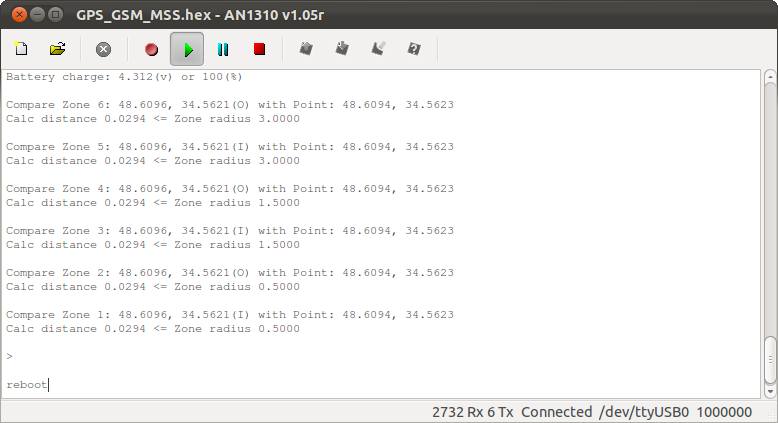
Шаг третий - запуск и работа с Bootloader'ом
Итак, может быть два режима работы микроконтроллера: режим выполнения основной программы и режим Bootloader'а. После подачи питания на микроконтроллер, либо после Reset, загрузчик Bootloader'а по некоторым признакам принимает решение, какой из них необходимо запустить. О необходимости запуска Bootloader'а говорят следующие признаки:
-
Oсновной программы нет, например первый запуск
-
Если на входе RX логический ноль (в терминах RS-232 состояние “Break")
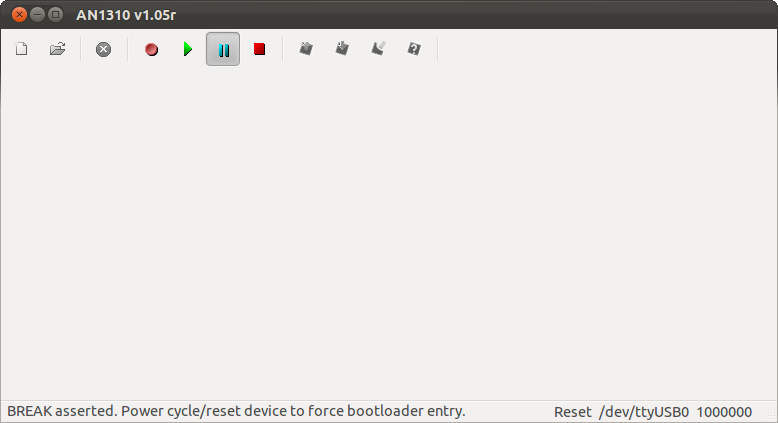
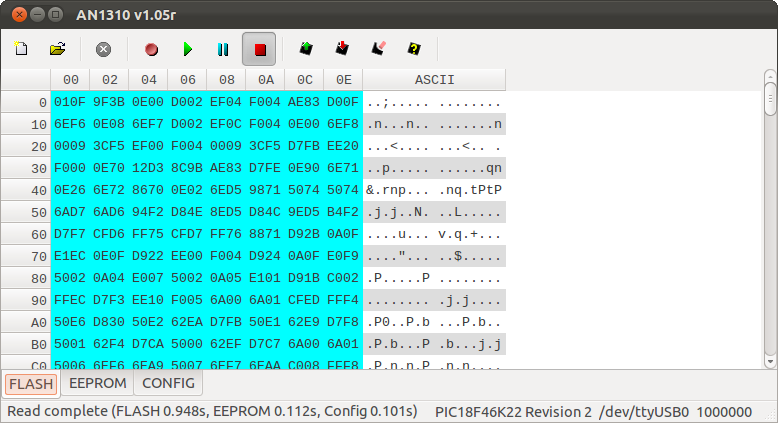
Таким образом, при необходимости запустить Bootloader, можно использавать следующую последовательность действий: физически подключить микроконтроллер к ПК, установить логический ноль на RX, это можно сделать посредством кнопочки  , после чего ввести микроконтроллер в состояние RESET (в простейшем случае - включить/выключить питание). С этого момента к нему можно подключаться со стороны ПК
, после чего ввести микроконтроллер в состояние RESET (в простейшем случае - включить/выключить питание). С этого момента к нему можно подключаться со стороны ПК 
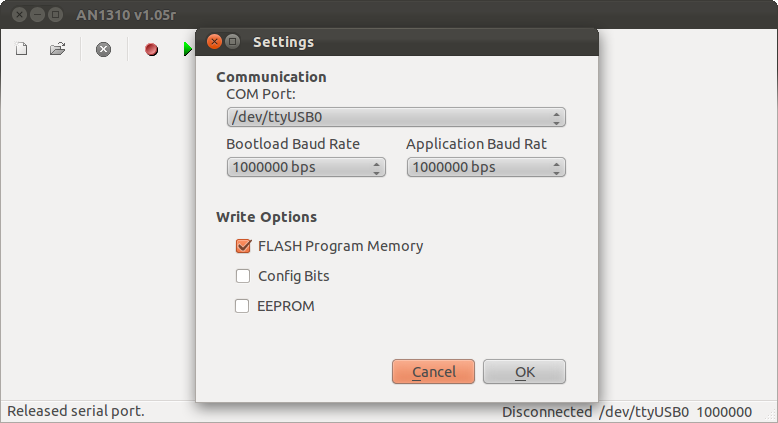
ПО для ПК поставляеncя в исходниках, при необходимости его можно подкорректировать в QTCreator, а для Windows уже есть готовый исполняемый .exe файл. Если при работе в Linux подозрительно работает переходник на PL2303, попробуйте сделать следующее:
~$ sudo modprobe -r pl2303
~$ sudo modprobe pl2303
Если в Linux оболочка для работы с Bootloader'ом вообще не видит USB-to-serial переходника (например /dev/ttyUSB0), скорее всего текущий пользователь просто не обладает соответствующими правами. Поскольку постоянно запускать программу их-под root'a неудобно, ниже описан конкретный случай лечения OpenSUSE 12.1 - полными правами на USB-to-serial обладает группа dialout, поэтому в неё нужно добавить текущего пользователя системы, после чего, чтобы изменения вступили в силу, ОБЯЗАТЕЛЬНО перелогиниться:
oleg@linux-ubuc:~> ls -l /dev/ttyUSB?
crw-rw---- 1 root dialout 188, 0 марта 1 10:13 /dev/ttyUSB0
oleg@linux-ubuc:~> sudo /usr/sbin/groupmod -A $USER dialout
В Ubuntu 12.04 добавить пользователя можно так: sudo adduser $USER dialout
На этом всё, надёжных девайсов Вам !
На всякий пожарный исходники тут.